
This is the Multiple Choice Questions Part 3 of the Series in DC Motors as one of the Electrical Engineering topic. In Preparation for the REE Board Exam make sure to expose yourself and familiarize in each and every questions compiled here taken from various sources including but not limited to past Board Exam Questions in Electrical Engineering field, Electrical Engineering Books, Journals and other Electrical Engineering References.
Continue Practice Exam Test Questions Part 3 of the Series
Choose the letter of the best answer in each questions.
⇐ MCQ in DC Motors Part 2 | REE Board Exam
101. In Fig. 1, the quantity VIa represents
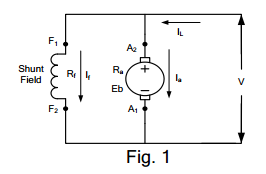
A. mechanical output of motor
B. core losses
C. friction and windage losses
D. all losses
Answer: Option D
Solution:
102. The mechanical power developed in a dc motor is maximum when back emf (Eb) is equal to ____ the applied voltage (V).
A. twice
B. half
C. one-third
D. none of these
Answer: Option B
Solution:
103. When the speed of a dc shunt motor increases, its armature current
A. increases
B. decreases
C. remains constant
D. none of these
Answer: Option B
Solution:
104. The amount of back emf of a shunt motor will increase when
A. the load is increased
B. the field is weakened
C. the field is strengthened
D. none of these
Answer: Option C
Solution:
105. The speed of a dc motor is
A. directly proportional to flux per pole
B. inversely proportional to flux per pole
C. inversely proportional to applied voltage
D. none of these
Answer: Option B
Solution:
106. The torque developed by a dc motor is directly proportional to
A. flux per pole x armature current
B. armature resistance x applied voltage
C. armature resistance x armature current
D. none of these
Answer: Option A
Solution:
107. The shaft torque (Tsh) in a dc motor is less than total armature torque (Ta) because of
A. Cu losses
B. field losses
C. iron and friction losses
D. none of these
Answer:
Solution:
108. Armature reaction in a dc motor is increased
A. when the armature current increases
B. when the armature current decreases
C. when the field current decreases
D. by interpoles
Answer: Option A
Solution:
109. With respect to the direction of rotation, interpoles on a dc motor must have the same polarity as the main poles
A. ahead of them
B. behind them
C. along them
C. none of these
Answer: Option B
Solution:
110. In a dc motor, the brushes are shifted from the mechanical neutral plane in direction opposite to the rotation to
A. decrease speed
B. increase speed
C. reduce sparking
D. produce flat characteristics
Answer: Option C
Solution:
111. In very large dc motors with severe heavy duty, armature reaction effects are corrected by
A. using interpoles only
B. using compensatory windings in addition to interpoles
C. shifting the brush position
D. none of these
Answer: Option B
Solution:
112. The speed of a ____ motor is practically constant.
A. cummulatively compounded
B. series
C. differentially compounded
D. shunt
Answer: Option D
Solution:
113. ____ motor is a variable speed motor.
A. series
B. shunt
C. cummulatively compounded
D. differentially compounded
Answer: Option A
Solution:
114. The most commonly used method of speed control of a dc motor is by varying
A. voltage applied to the motor
B. field strength
C. effective number of conductors in series
D. armature circuit resistance
Answer: Option B
Solution:
115. The running speed of a dc series motor is basically determined by
A. field excitation
B. load
C. armature resistance
D. none of these
Answer: Option B
Solution:
116. After a shunt motor is up to speed, the speed may be increased considerably by
A. increasing field circuit resistance
B. decreasing field circuit resistance
C. increasing armature circuit resistance
D. reducing the load
Answer: Option B
Solution:
117. ____ motor has the best speed regulation.
A. series
B. cummulatively compounded
C. shunt motor
D. differentially compounded
Answer: Option D
Solution:
118. The deciding factor in the selection of a dc motor for a particular application is its ______ characteristics.
A. speed-torque
B. speed-armature current
C. torque-armature current
D. none of these
Answer: Option A
Solution:
119. The demand for a large increase in torque of a dc shunt motor is met by a
A. large decrease in speed
B. large increase in speed
C. large increase in current
D. small increase in current
Answer: Option C
Solution:
120. The demand for a large increase in torque of a dc series motor is met by a
A. large decrease in current
B. large decrease in speed
C. large increase in speed
D. small decrease in speed
Answer: Option B
Solution:
121. A series motor will over-speed when
A. the load is increased
B. the field is opened
C. the armature circuit is opened
D. load is removed
Answer: Option D
Solution:
122. As the load increases, a ____ motor will speed up.
A. series
B. shunt
C. cummulatively compounded
D. differentially compounded
Answer: Option D
Solution:
123. A cummulatively compounded motor does not run at dangerous speed at light loads because of the presence of
A. shunt winding
B. series winding
C. interpoles
D. compensating winding
Answer: Option A
Solution:
124. DC shunt motors are used in applications where ____ is required.
A. high starting torque
B. practically constant speed
C. high no-load speed
D. variable speed
Answer: Option B
Solution:
125. DC series motors are used in applications where ______ is required.
A. high starting torque
B. constant speed
C. low no-load speed
D. none of these
Answer: Option A
Solution:
126. Cummulatively compounded motors are used where we require
A. variable speed
B. poor speed regulation
C. sudden heavy loads for short duration
D. none of these
Answer: Option C
Solution:
127. For the same rating, ____ motor has the highest starting torque.
A. shunt
B. cummulatively compounded
C. differentially compounded
D. series
Answer: Option D
Solution:
128. _____ motors never use belt-connected loads.
A. series
B. shunt
C. cummulatively compounded
D. differentially compounded
Answer: Option A
Solution:
129. For 20% increase in current, the motor that will give the greatest increase in torque is ____ motor.
A. shunt
B. series
C. cummulatively compounded
D. differentially compounded
Answer: Option B
Solution:
130. The ____ motor is used to start heavy loads.
A. series
B. shunt
C. differentially compounded
D. none of these
Answer: Option A
Solution:
131. When load is removed, the motor that will run at the highest speed is
A. shunt
B. series
C. cummulatively compounded
D. differentially compounded
Answer: Option B
Solution:
132. For the same rating, ____ motor has the least starting torque.
A. cummulatively compounded
B. series
C. shunt
D. none of these
Answer: Option C
Solution:
133. A dc series motor is most suitable for
A. cranes
B. pump
C. lathes
D. punch presses
Answer: Option A
Solution:
134. ____ is most suitable for punch presses.
A. shunt
B. series
C. differentially compounded
D. cummulatively compounded
Answer: Option D
Solution:
135. In a vacuum cleaner, we generally used ____ motor.
A. shunt
B. cummulatively compounded
C. series
D. differentially compounded
Answer: Option C
Solution:
136. The most suitable motor for elevators is the ____ motor.
A. series
B. shunt
C. differentially compounded
D. cummulatively compounded
Answer: Option D
Solution:
137. The friction and windage losses in a dc motor depends upon
A. speed
B. flux
C. armature current
D. field and armature resistance
Answer: Option A
Solution:
138. The iron losses in a dc motor depend upon
A. flux only
B. speed only
C. both speed and flux
D. none of these
Answer: Option C
Solution:
139. The greatest percentage of power loss in a dc motor is due to
A. windage loss
B. copper loss
C. core loss
D. friction loss
Answer: Option B
Solution:
140. A motor takes a large current at starting because
A. the armature resistance is high
B. back emf is low
C. shunt field is producing weak field
D. none of these
Answer: Option B
Solution:
141. Excessive sparking at the brushes may be cause due to
A. dirt on the commutator
B. loose coupling
C. misalignment of machine
D. worn bearings
Answer: Option A
Solution:
142. Excessive motor vibration is caused by
A. too much brush tension
B. worn bearings
C. open armature coil
D. bent shaft
Answer: Option B
Solution:
143. Overheating of a dc motor is often due to
A. insufficient end play
B. loose parts
C. overloads
D. rough commutator
Answer: Option C
Solution:
144. Hot bearings of a dc motor may be caused by
A. poor ventilation
B. incorrect voltage
C. loose coupling
D. lack or dirty lubricant
Answer: Option D
Solution:
145. Intermittent sparking at the brushes of a dc motor may be caused due to
A. an open armature coil
B. intermittent load
C. loose coupling
D. incorrect voltage
Answer: Option A
Solution:
146. The function of a brush and commutator arrangement in a dc motor is
A. to produce unidirectional torque
B. to produce unidirectional current in the armature
C. to help changing the direction of rotation of the armature
D. to reduce sparking
Answer: Option A
Solution:
147. The direction of rotation of a dc motor can be reversed
A. by reversing the connections of both armature and the field windings with the supply
B. by reversing the connections of both armature or the filed winding connections with the supply
C. by reducing the field flux
D. by introducing an extra resistance in the armature circuit
Answer: Option B
Solution:
148. A dc series motor should always be started with load because
A. at no-load it will rotate at a dangerously high speed
B. at no-load it will not develop high starting torque
C. it cannot start without load
D. it draws small amount of current at no-load
Answer: Option A
Solution:
149. Swinburne’s method cannot be used for determining the efficiency of a dc series motor because
A. it is not advisable to run a series motor on no-load
B. a series motor takes excessive current at no-load
C. a series motor develops very high starting torque
D. it is not possible to load a series motor in steps
Answer: Option A
Solution:
150. What is the effect produced by the electric motor?
A. magnetic effect only
B. magnetic as well as heating effect
C. heating effect only
D. heating as well as chemical effect
Answer: Option B
Solution:
⇒ MCQ in DC Motors Part 4 | REE Board Exam
Related Content


P inoyBIX educates thousands of reviewers and students a day in preparation for their board examinations. Also provides professionals with materials for their lectures and practice exams. Help me go forward with the same spirit.
“Will you subscribe today via YOUTUBE?”
TIRED OF ADS?
- Become Premium Member and experienced complete ads-free content browsing.
- Full Content Access to Premium Solutions Exclusive for Premium members
- Access to PINOYBIX FREEBIES folder
- Download Reviewers and Learning Materials Free
- Download Content: You can see download/print button at the bottom of each post.
PINOYBIX FREEBIES FOR PREMIUM MEMBERSHIP:
- CIVIL ENGINEERING REVIEWER
- CIVIL SERVICE EXAM REVIEWER
- CRIMINOLOGY REVIEWER
- ELECTRONICS ENGINEERING REVIEWER (ECE/ECT)
- ELECTRICAL ENGINEERING & RME REVIEWER
- FIRE OFFICER EXAMINATION REVIEWER
- LET REVIEWER
- MASTER PLUMBER REVIEWER
- MECHANICAL ENGINEERING REVIEWER
- NAPOLCOM REVIEWER
- Additional upload reviewers and learning materials are also FREE
FOR A LIMITED TIME
If you subscribe for PREMIUM today!
You will receive an additional 1 month of Premium Membership FREE.
For Bronze Membership an additional 2 months of Premium Membership FREE.
For Silver Membership an additional 3 months of Premium Membership FREE.
For Gold Membership an additional 5 months of Premium Membership FREE.
Join the PinoyBIX community.